在 “ 探究杠杆的平衡条件 ” 的实验中:
( 1 )不挂钩码时,调节螺母,使杠杆在 位置平衡;
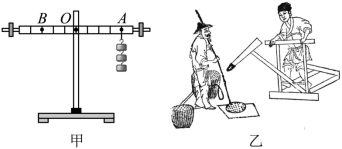
( 2 )如图甲所示,在 A 点挂 3 个钩码,在 B 点挂 个钩码,使杠杆再次在原位置平衡;
( 3 )在答题卡的相应位置,画出 A 点所受拉力的力臂 l ;
( 4 )如图乙所示是《天工开物》记载的踏碓(碓: dui ,古代的一种给稻谷去壳的工具。用脚连续踏杆的一端,另一端就会连续起落)。踏碓属于 杠杆。
答案
水平 4  费力
费力
【详解】( 1 ) [1] 不挂钩码时,调节螺母,使杠杆在水平位置平衡,这样便于在杠杆上直接读出力臂。
( 2 ) [2] 设一个钩码的重力为 G ,杠杆上一格的长度为 L ,根据杠杆平衡条件,则有
解得
n =4
( 3 ) [3] 因为此时杠杆在水平位置平衡, A 点的钩码对杠杆的拉力竖直向下,与杠杆垂直,所以 A 点所受拉力的力臂 l 可直接画在杠杆上,如图所示:

( 4 ) [4] 踏碓在使用的过程中,动力臂小于阻力臂,为费力杠杆。